← Back to all projects
Design, Optimization and Control of a Hydrofoil System for High-Performance Marine Vessels
Led a team through the complete lifecycle of a hydrofoil vessel - from foil geometry
optimization and 3-DoF dynamics modeling through LQR-based active ride control to
physical manufacturing and testing. The work was published and presented at ASME OMAE 2025.
MATLAB
LQR Control
Dynamics Modeling
CFD
Foil Optimization
Hardware
Team Lead
Key Results
89%
Drag reduction (7.47 kN → 812 N)
19.4 kn
Stable foilborne speed
~0°
Pitch angle maintained
0.5 m
Controlled ride height
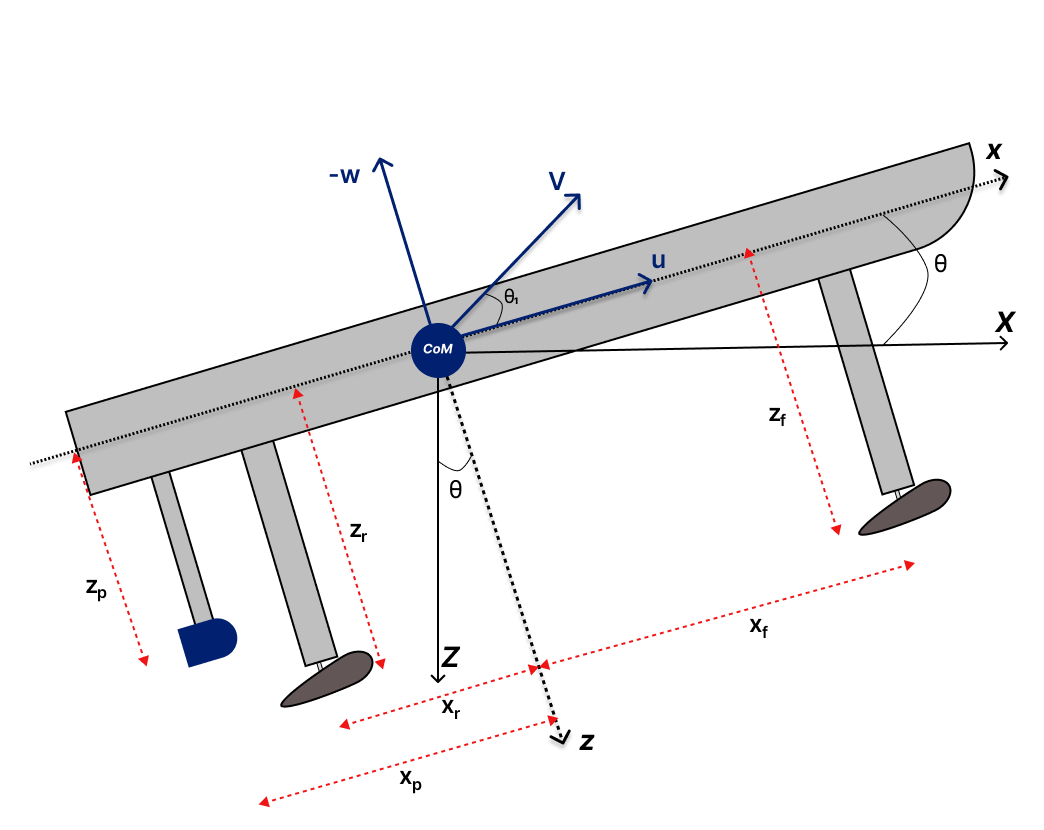
Fig 1. Hydrofoil vessel configuration - 3-DoF coordinate system with front, rear, and propulsion foil positions
Problem & Motivation
Conventional displacement hulls face a fundamental speed limitation: as velocity
increases, wave-making resistance grows dramatically. Hydrofoils solve this by
lifting the hull clear of the water at speed, but this introduces a new challenge -
maintaining stable flight above the surface requires active control of the foil
angle of attack in real time.
This project addressed both the design optimization (choosing the right foil
geometry for maximum lift-to-drag ratio) and the control problem (keeping the
vessel stable in foilborne mode).
Foil Design & Optimization
The foil geometry was optimized for the target operating speed and vessel displacement
using MATLAB and low-order flow simulation. Key design parameters included foil span,
chord, section profile, and strut configuration.
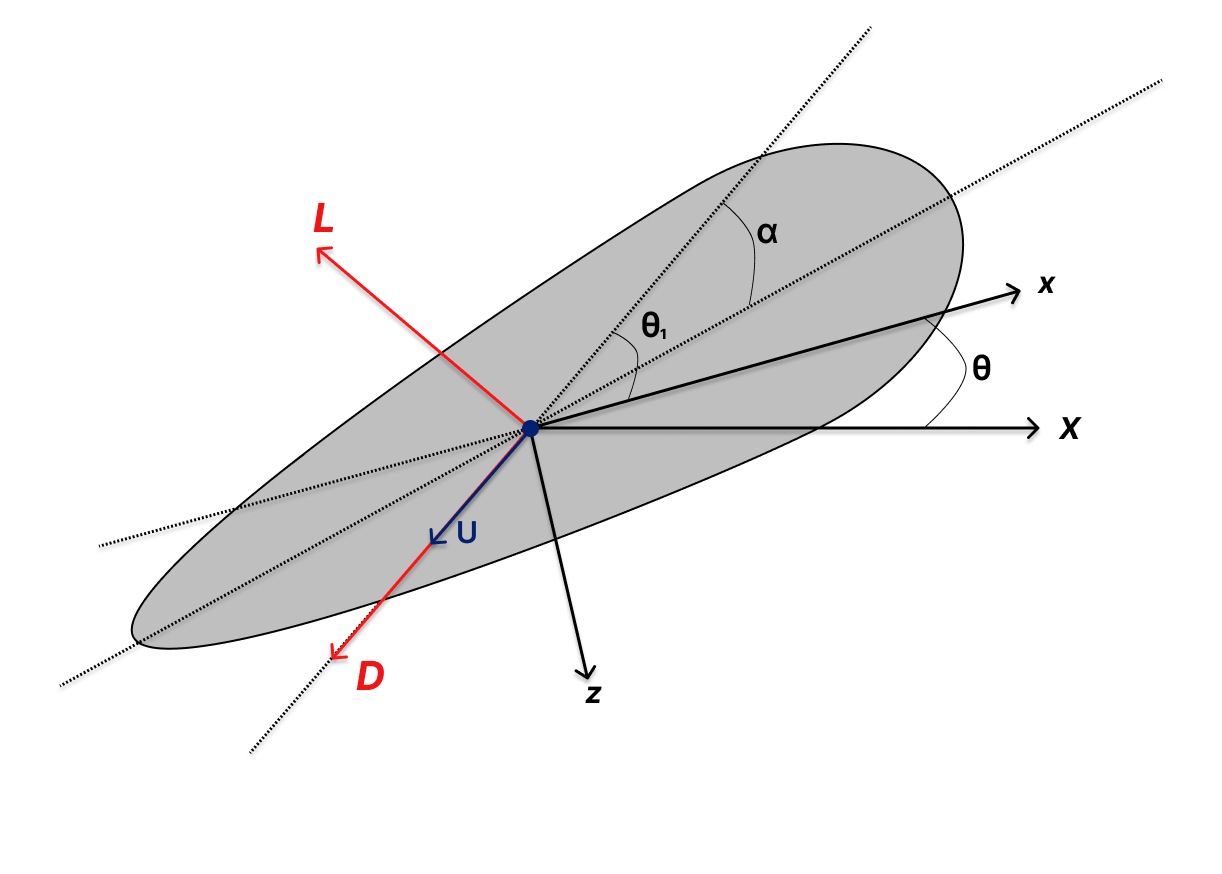
Fig 2. Foil free body diagram - lift (L), drag (D), angle of attack (α), and coordinate frames
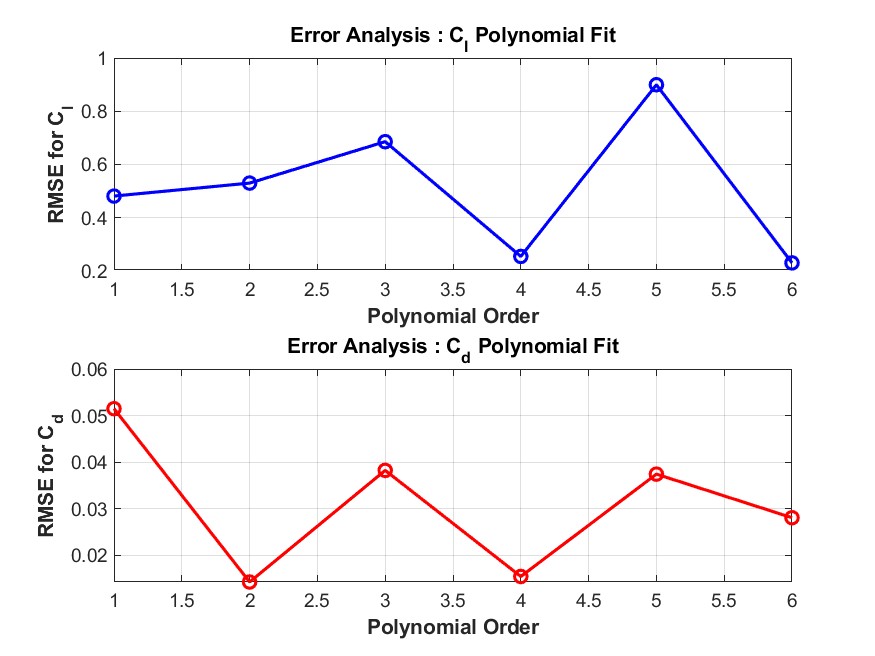
Fig 3. NACA 2415 polynomial fit error - RMSE for Cl and Cd coefficients
Hullborne Performance — Savitsky Method
Before designing the foil system, the baseline hullborne performance was characterized
using the Savitsky method. This established the trim angle and resistance curves that
the hydrofoil system needed to improve upon.
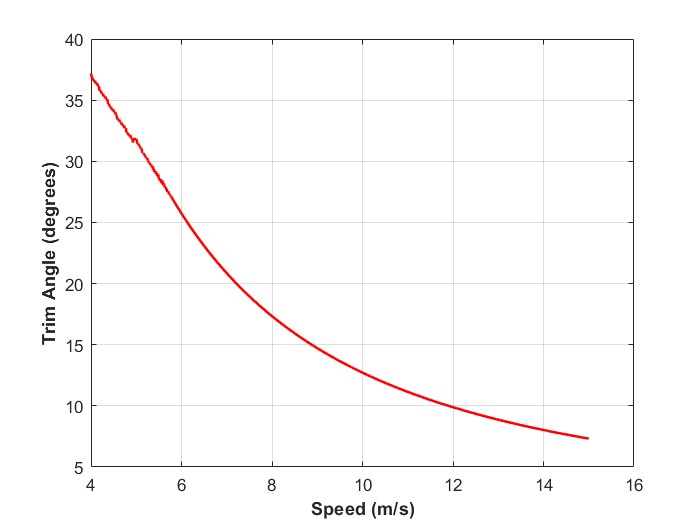
Fig 4. Hullborne trim angle vs speed - Savitsky method
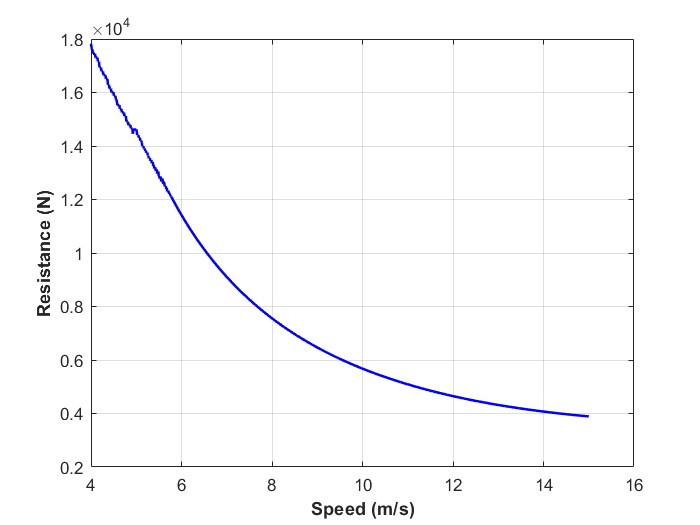
Fig 5. Hullborne resistance vs speed - baseline for foilborne comparison
Active Ride Control with LQR
An LQR (Linear Quadratic Regulator) controller was designed for active ride control,
maintaining near-zero pitch angle and a target ride height of 0.5 meters. The controller
modulates the foil angle of attack in real time based on heave and pitch state feedback.
The LQR was tuned to balance ride comfort (minimizing pitch oscillations) against
actuator effort (preventing excessive foil deflections that could cause ventilation
or stall).
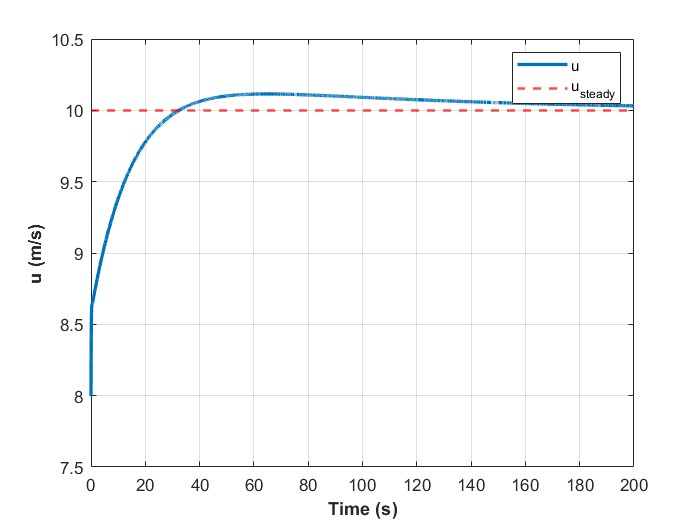
Fig 6. Surge velocity response - settles to steady-state 10 m/s (~19.4 knots)
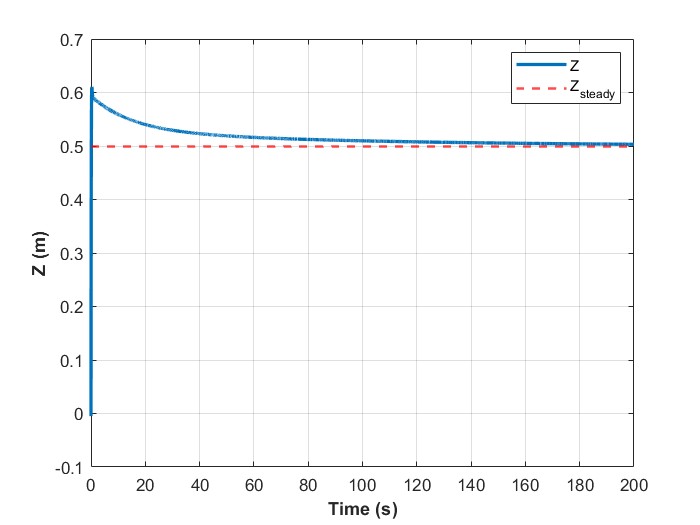
Fig 7. Ride height response - converges to target 0.5 m with minimal overshoot
From CAD to Water
In foilborne operation at 19.4 knots, resistance dropped from 7.47 kN (hullborne)
to just 812 N - an 89% reduction. The vessel maintained approximately 0° pitch angle
and stable 0.5 m ride height under the LQR controller, demonstrating the viability
of the combined design-and-control approach.
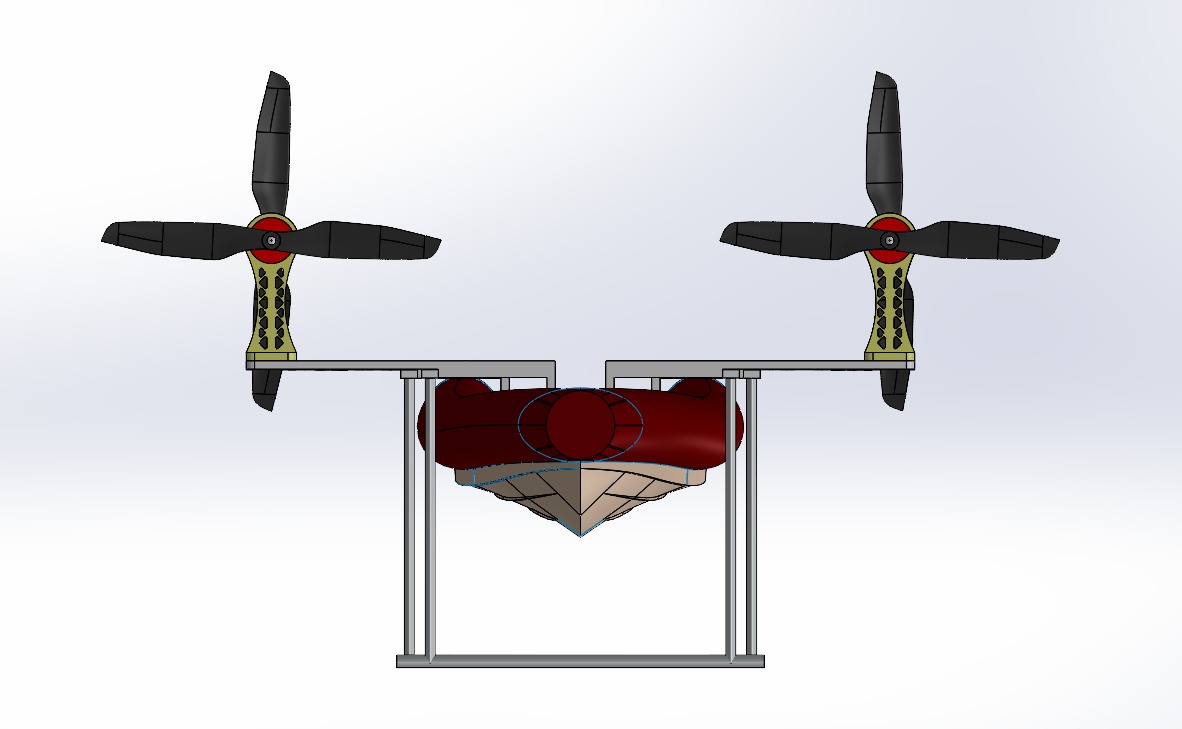
Fig 8. CAD model - hull with propulsion system and frame

Fig 9. First towing tank test at IIT Madras
Publication
This work was presented and published at the ASME International Conference on
Ocean, Offshore and Arctic Engineering (OMAE) 2025 in Vancouver, Canada. The paper
details the integrated framework for hydrofoil vessel design spanning geometry
optimization, dynamics modeling, and LQR-based active ride control.
Connection to SAVTOA Internship
This academic work built upon foundations laid during my R&D internship at SAVTOA
Software Technologies, where I consulted on the design of an autonomous hydrofoil
catamaran. At SAVTOA, I developed predictive AoA control and optimized foil geometry
that increased vessel speed by 87% and reduced drag by 35%. The preliminary design
was adopted for the ongoing construction of one of India's first autonomous hydrofoil
vessels.